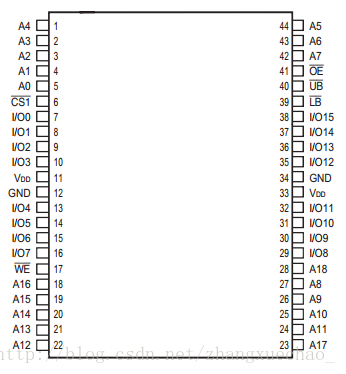
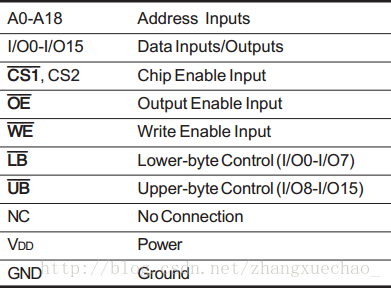
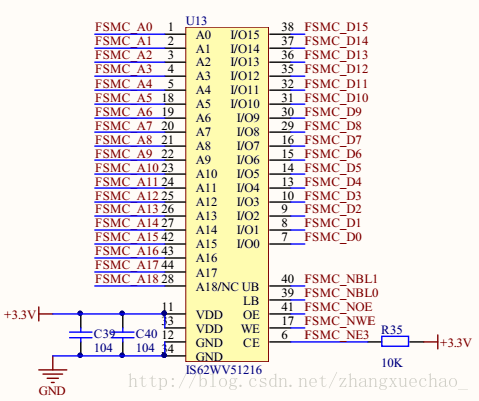
引脚定义
  FSMC配置步骤 1.使能对应引脚GPIO时钟
2.配置GPIO引脚模式
3.使能FSMC时钟
4.FSMC初始化
5.存储器块使能
举例
 #define Bank1_SRAM3_ADDR ((u32)(0x68000000)) //首地址0x60000000,每块0x40000000
void SRAM_gpio_init() { GPIO_InitTypeDef gpiof = { GPIO_Pin_0 " GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15, //FSMC_A0 - FSMC_A9 GPIO_Speed_50MHz, GPIO_Mode_AF_PP }; GPIO_InitTypeDef gpiog0_5 = { GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5, //FSMC_A10 - FSMC_A15 GPIO_Speed_50MHz, GPIO_Mode_AF_PP }; GPIO_InitTypeDef gpiod = { GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | //FSMC_A15 - FSMC_A18 GPIO_Pin_14 | GPIO_Pin_15 | GPIO_Pin_0 | GPIO_Pin_1 | //FSMC_D0 - FSMC_D3 GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10, //FSMC_D13 - FSMC_D15 GPIO_Speed_50MHz, GPIO_Mode_AF_PP }; GPIO_InitTypeDef gpioe = { //FSMC_D4 - FSMC_D12 GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15, GPIO_Speed_50MHz, GPIO_Mode_AF_PP };
GPIO_InitTypeDef gpioe0_1 = { GPIO_Pin_0 | GPIO_Pin_1, //FSMC_NBL0-FSMC_NBL1 GPIO_Speed_50MHz, GPIO_Mode_AF_PP }; GPIO_InitTypeDef gpiod4_5 = { GPIO_Pin_4 | GPIO_Pin_5, //FSMC_NOE - FSMC_NWE GPIO_Speed_50MHz, GPIO_Mode_AF_PP }; GPIO_InitTypeDef gpiog10 = { GPIO_Pin_10, //片选 GPIO_Speed_50MHz, GPIO_Mode_AF_PP };
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF | RCC_APB2Periph_GPIOG | RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE, ENABLE);
GPIO_Init(GPIOF, &gpiof); GPIO_Init(GPIOG, &gpiog0_5); GPIO_Init(GPIOD, &gpiod); GPIO_Init(GPIOE, &gpioe); GPIO_Init(GPIOE, &gpioe0_1); GPIO_Init(GPIOD, &gpiod4_5); GPIO_Init(GPIOG, &gpiog10); }
void FSMC_sram_init() { FSMC_NORSRAMInitTypeDef fsmc = {0}; FSMC_NORSRAMTimingInitTypeDef FSMC_ReadWriteTimingStruct = {0};
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC, ENABLE);
FSMC_ReadWriteTimingStruct.FSMC_AddressSetupTime = 0x00; FSMC_ReadWriteTimingStruct.FSMC_AddressHoldTime = 0x00; FSMC_ReadWriteTimingStruct.FSMC_DataSetupTime = 0x08; FSMC_ReadWriteTimingStruct.FSMC_BusTurnAroundDuration = 0x00; FSMC_ReadWriteTimingStruct.FSMC_CLKDivision = 0x00; FSMC_ReadWriteTimingStruct.FSMC_DataLatency = 0x00; FSMC_ReadWriteTimingStruct.FSMC_AccessMode = FSMC_AccessMode_A;
fsmc.FSMC_Bank = FSMC_Bank1_NORSRAM3; fsmc.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable; fsmc.FSMC_MemoryType = FSMC_MemoryType_SRAM; fsmc.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b; fsmc.FSMC_BurstAccessMode = FSMC_BurstAccessMode_Disable; fsmc.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable; fsmc.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low; fsmc.FSMC_WrapMode = FSMC_WrapMode_Disable; fsmc.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState; fsmc.FSMC_WriteOperation = FSMC_WriteOperation_Enable; fsmc.FSMC_WaitSignal = FSMC_WaitSignal_Disable; fsmc.FSMC_ExtendedMode = FSMC_ExtendedMode_Enable; //扩展模式使能 fsmc.FSMC_WriteBurst = FSMC_WriteBurst_Disable; fsmc.FSMC_ReadWriteTimingStruct = &FSMC_ReadWriteTimingStruct; fsmc.FSMC_WriteTimingStruct = &FSMC_ReadWriteTimingStruct; FSMC_NORSRAMInit(&fsmc);
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM3, ENABLE); }
void SRAM_read(u8 *buf, u32 addr, u32 num) { u32 i = 0;
for(i = 0; i < num; i++) { buf[i] = *(u8*)(Bank1_SRAM3_ADDR + addr + i); } }
void SRAM_write(u8 *buf, u32 addr, u32 num) { u32 i = 0; u8 *p = (u8*)(Bank1_SRAM3_ADDR + addr);
for(i = 0; i < num; i++) { *(p + i) = buf[i]; } }
|